Research news
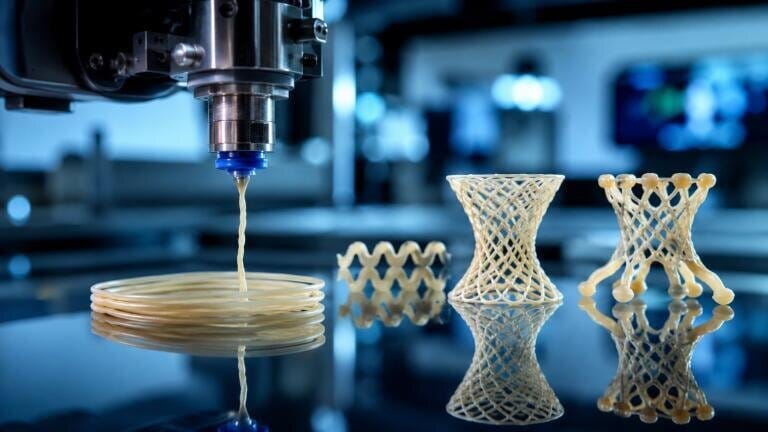
Researchers at Harvard University have developed a rotational multimaterial 3D printing method to create soft filaments that bend, twist, expand or contract in response to temperature, with potential uses in robotic grippers, active filters and biomedical materials
Harvard scientists have developed a 3D printing strategy that can turn soft, hair-like filaments into programmable artificial muscles capable of controlled movement in response to heat or cooling.
The work has shown how active liquid crystal elastomers and passive elastomers can be printed side by side within a single filament. This arrangement effectively pre-programmes the filament to bend, twist, expand or contract in defined ways when exposed to changes in temperature.
The research was led by the laboratory of Dr. Jennifer Lewis, the ‘Hansjörg Wyss Professor of Biologically Inspired Engineering’ at the John A. Paulson School of Engineering and Applied Sciences at Harvard University, Cambridge, Massachusetts. The study’s first author was Dr. Mustafa Abdelrahman, a postdoctoral researcher in Lewis’ laboratory.
Nature contains many slender structures that can bend, coil and move with striking precision, from climbing grape vines and folded proteins to elephant trunks, which can pick up a peanut yet also have the strength to fell a tree. The Harvard team sought to reproduce aspects of this biological control in synthetic materials, with the aim to create soft structures able to perform more complex motions than conventional printed elastomers.
The researchers used rotational multimaterial 3D printing – a technique developed in the Lewis laboratory – to produce filaments that combined active and passive materials within the same cross-section. The active material was a liquid crystal elastomer, a specialised polymer that can contract along a preferred molecular direction when heated above a transition temperature. The passive material was a soft elastomer that retained its shape despite temperature changes and acted as a mechanical guide to direct motion.
By extruding both materials through a rotating nozzle, the team could position active and passive regions precisely around the full cross-section of each filament. Because the liquid crystal elastomer shrank along its internal molecular alignment when heated, while the passive elastomer did not, even a simple bilayer filament could bend as one side shortened and the other resisted. Rotation of the nozzle during printing allowed the researchers to write a helical molecular alignment into the filament and define how it would curve or twist when activated.
This meant that the filament’s final response to temperature could be programmed during the printing process itself, without the need to assemble multiple layers or apply mechanical post-processing after fabrication.
“I saw this really beautiful [rotational 3D printing platform] and thought: ‘What if we plug in active materials and pattern them within the filament – can we drive shape change that way?’” Abdelrahman said. Before he joined the Lewis laboratory, he had made sheets of liquid crystal elastomers through more complex methods and had begun to look for more customisable approaches.
To validate and predict the behaviour of the materials, the team worked with Professor L. Mahadevan of the Harvard department of physics whose group specialises in the mechanics of natural structures, and Professor Joanna Aizenberg, of the Harvard department of chemistry and chemical biology whose laboratory helped to characterise the molecular alignment of the liquid crystal elastomers. The alignment studies used X-ray scattering measurements at Brookhaven National Laboratory on Long Island, New York, USA.
Once the researchers had shown that they could programme the shape change of individual filaments, they used the filaments as building blocks for more complex architected structures. They printed sinusoidal filaments – or wavy strands – that appeared identical at first but deformed in different ways depending on where the active liquid crystal elastomer had been placed. When the active elastomer was printed on the outside of the wave’s curvature, heat caused the filament to straighten and expand. When it was printed on the inside, the same heat stimulus caused the filament to shrink and contract.
The team then wove these unit cells into flat lattices to show how the approach could support practical soft robotic functions. In one demonstration, the researchers produced active filters that opened when heated to allow spherical particles to pass through and contracted when cooled to trap or support them. In another, they made free-standing pick-and-place grippers that could be lowered on to multiple rods, heated to grip and lift them and then cooled to release them.
A further experiment used a lattice printed with alternating expanding and contracting regions. When heated in an oil bath, the structure morphed into a dome-like shape that closely matched the form predicted by simulations.
The researchers have also begun to assess how far the technology could be scaled. With custom-fabricated nozzles and carefully tuned inks, they have printed filaments as small as around 100 micrometres in diameter and have identified scope to reduce the size even further.
“In terms of scalability, you could create more complex nozzles that integrate with other materials in the future – like, having a liquid metal channel to enable actuation, or integrating other functionality,” said Jackson Wilt, a doctoral candidate and co-author of the study.
Although liquid crystal elastomers have only begun to appear in industrial products, they have attracted significant research interest for soft robotics, energy damping and biomedical devices. The Harvard team said the printing framework could help to move artificial muscle-like materials towards practical use.
“This filament design and printing framework could accelerate the transition of artificial muscle-like materials from the lab to real-world technologies,” said Lewis.
Potential applications include reconfigurable soft robotic grippers able to handle multiple delicate objects at once, active filters and valves with temperature-tunable porosity and flow pathways and entangled injectable filaments that could lock together in place to form porous, high-surface-area structures. In biomedical settings, such materials could have value where rapid clot formation or tissue support is required.
For further reading please visit: 10.1073/pnas.2537250123
ILM Guide 2026/27




















2.jpg)
