News
Researchers at Seoul National University have developed an intelligent artificial muscle that can contract, sense force and measure deformation in real time, with potential uses in humanoid robotics, rehabilitation devices and soft robotic grippers
Researchers at Seoul National University (SNU) College of Engineering, Seoul, Korea, have developed an intelligent artificial muscle that can combine sensing and actuation within a single material system, with the aim to help robots to manipulate objects more delicately and respond to their surroundings with greater precision.
The research team, led by Professor Yong-Lae Park from the department of mechanical engineering, designed the artificial muscle to mimic the structure and function of biological muscle–tendon complexes. The system incorporated liquid metal channels within a liquid crystal elastomer, a class of responsive polymer material that can change shape when stimulated. In the reported design, the material contracted in response to electrical stimulation while also able to measure internal force and length in real time.
The researchers said the approach allowed motor signals and sensory signals to be processed simultaneously, in a manner broadly comparable with the interaction between the somatic nervous system and sensory nervous system in biological muscle. The work has been positioned as a potential advance for next-generation humanoid robots, particularly where machines must operate safely near people, handle delicate objects or adjust their behaviour in response to changing physical conditions.
Demand for more sophisticated robotic actuation technologies has increased across fields such as humanoid robotics, logistics automation, rehabilitation engineering and assistive medical devices. In these settings, robots need to grasp, lift and handle objects without damage, while also able to detect object properties such as stiffness, size and resistance. Conventional robotic actuators often separate movement and sensing functions, which can require additional sensors, more complex wiring and more elaborate control systems.
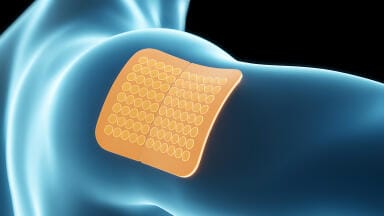
To address this limitation, the SNU team developed a liquid crystal elastomer-based artificial muscle in which actuation and sensing were integrated into one structure. The material consisted of isotropic liquid crystal elastomer and nematic liquid crystal elastomer connected in series, with the two regions intended to reproduce the respective functions of tendon and muscle. In materials science, isotropic refers to a state in which material properties are the same in all directions, while nematic refers to a molecular state in which the molecules align in a defined direction. This means isotropic liquid crystal elastomer displays broadly similar properties regardless of direction, whereas nematic liquid crystal elastomer can show a greater response along the direction of molecular alignment.
The artificial muscle included two embedded liquid metal channels. One acted as a motor element, which generated contraction through electrically induced heating. The other acted as a sensor, which detected force and deformation. This arrangement allowed the artificial muscle to sense its own contraction state and to generate motion at the same time, without the need for external sensors.
The team also demonstrated the artificial muscle in robotic fingers and gripper systems. These devices were able to grasp objects delicately and distinguish stiffness and size autonomously. The researchers further showed that two artificial muscles could be arranged as an antagonistic pair, in which the muscles operated in opposite directions. This configuration allowed more precise control of contraction and relaxation and supported faster, more accurate actuation.
“The artificial muscle developed in this study replicates the unique structure and function of biological muscles, enabling robots to interact with their surroundings in a more flexible and sensitive manner,” Yong-Lae Park said.
“It is expected to find wide-ranging applications in humanoid robots, as well as in medical, rehabilitation and soft robotics,” he added.
Professor Park’s team has continued to pursue further work on structural optimisation and active cooling technologies, with the aim to increase the cooling speed of the artificial muscle. Faster cooling would be important because thermally driven artificial muscles often depend not only on how quickly they can heat and contract but also on how quickly they can cool and return to their original state.
Jiyeon Cho, the first author of the paper, is a doctoral candidate in the department of mechanical engineering at SNU and has conducted follow-up research on automated fabrication methods for artificial muscles.
The study was conducted through a collaboration between SNU and the University of California, San Diego, with support from the Korean Ministry of Science and the National Research Foundation of Korea.
For further reading please visit: 10.1002/adma.202503094
ILM 51.5 July 2026

.jpg)










-(1).jpg)